
Abstract
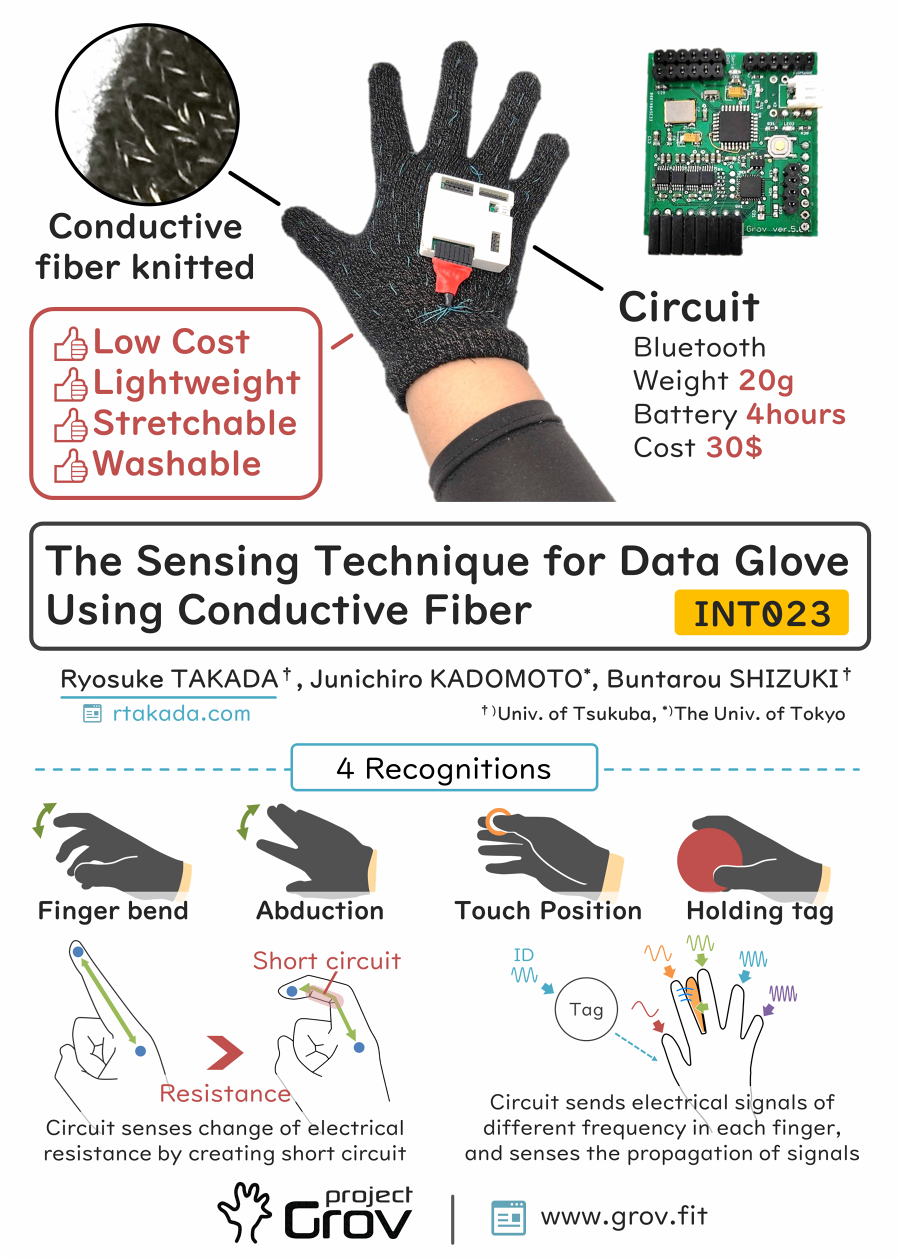
We demonstrate a sensing technique for data gloves using conductive fiber. This technique enables us to estimate hand shapes (bend of a finger and contact between fingers) and differentiates a grabbing tag. To estimate how far each finger bends, the electrical resistance of the conductive fiber is measured; this resistance decreases as the finger bends because the surface of the glove short circuits. To detect contact between fingers, we apply alternating currents with different frequencies to each finger and measure the signal propagation between the fingers. This principle is also used to differentiate a grabbing tag (each tag has an alternating current with a unique frequency). We developed a prototype data glove based on this technique.
Images
Information
Book Title
CHI EA '19
Volume
Number
Date
Pages
1-4
Citation
Copied!
, A Sensing Technique for Data Glove Using Conductive Fiber, CHI EA '19, 巻, 号, pp. 59 - 4